
Японський робопес KLEIYN з гнучкою спиною навчився лазити по стінах
Більшість сучасних чотирилапих роботів мають жорсткі тулуби цільної конструкції, що допомагає їм у виконанні окремих функцій. Однак у деяких сценаріях може знадобитися гнучка спина - це підтверджує розроблений у Японії робопес KLEIYN.

Жорстка спина забезпечує чотириногому роботу високу маневреність і можливість переносити вантажі; гнучка ж конструкція може виявитися необхідною, коли потрібно протиснутися у вузькі простори - наприклад, залізти по димоходу. Таке рішення запропонували інженери Токійського університету: встановлений на спині KLEIYN шарнір допомагає йому долати перешкоди різної висоти, зокрема ті, що можуть зустрітися на місцях стихійних лих. Шарнір дає змогу спині трохи згинатися, зменшуючи довжину тулуба для переміщення в складних умовах.
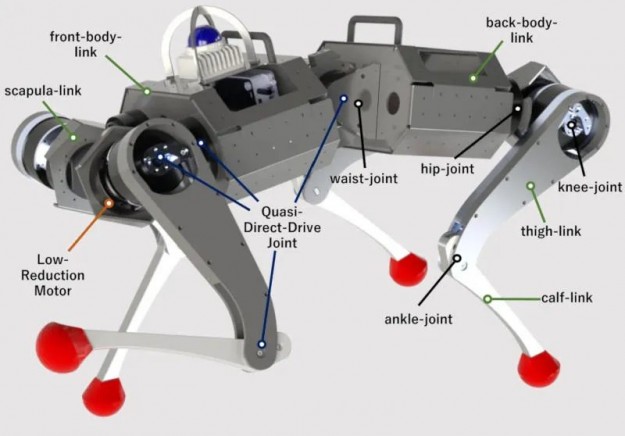
Замість того щоб встановлювати на кінцях кінцівок захвати або кігті, які допомогли б машині чіплятися за нерівні вертикальні поверхні, японські інженери вирішили забезпечити достатній тиск на суглоби, щоб робот міг підніматися навіть по гладких вертикальних стінах, якщо вони розташовані близько одна до одної. Кожна нога має три ступені свободи, а також шарнір з віссю нахилу в плечовому і задньому колінному суглобах. На всіх зчленуваннях встановлено приводи з передавальним відношенням 1:10 і крутним моментом 25 Нм. «Коліна» на передніх і задніх кінцівках KLEIYN спрямовані в протилежні боки, щоб забезпечити найкращий контакт із зовнішніми поверхнями під час вертикального руху.
Поперековий шарнір має один ступінь свободи і передавальне відношення 1:9 на двигуні з крутним моментом 40 Н-м. Він з'єднує дві однакові половини тулуба в алюмінієвому корпусі, усередині яких розміщені, зокрема, акумулятор і бортовий комп'ютер. У передній половині також розташовані лідар і вбудований інерціальний вимірювальний блок. Управління KLEIYN здійснює платформа зі штучним інтелектом Contact-Guided Curriculum Learning, яка навчалася з підкріпленням у віртуальних середовищах. Після навчання робот у реальному світі зміг піднятися двома вертикальними стінами, розташованими на відстані 800 мм одна від одної, зі швидкістю до 170 мм/с - це в 50 разів швидше, ніж в одного з аналогічних роботів, створених у США. Маса KLEIYN становить 13 кг, при висоті 400 мм і довжині випрямленого тулуба 760 мм. На практиці робот може бути корисний для промислових інспекцій і в пошуково-рятувальних операціях.
Джерело: SmartPhone.ua
Обговорення новини
Попередні новини
 У Tesla Optimus проблеми з «м'язами» і «розумом» - це відкладе старт масового виробництва21:23 04.07.2025
У Tesla Optimus проблеми з «м'язами» і «розумом» - це відкладе старт масового виробництва21:23 04.07.2025Ілон Маск (Elon Musk) не відмовляється від амбіцій щодо перетворення Tesla на великого виробника людиноподібних роботів і за підсумками поточного року обіцяє випустити 5000 екземплярів Optimus.
 У Пекіні пройшов перший у світі футбольний турнір між гуманоїдними роботами20:18 30.06.2025
У Пекіні пройшов перший у світі футбольний турнір між гуманоїдними роботами20:18 30.06.2025У столиці Китаю відбувся унікальний футбольний турнір, у якому взяли участь роботи-гуманоїди. Без будь-якого зовнішнього втручання, керовані тільки штучним інтелектом роботи вправно маневрували, відбирали м'яч і завдавали ударів по воротах.
 Учені з Університету Північної Аризони представили OpenExo - відкриту платформу для розроблення роботизованих екзоскелетів21:11 28.06.2025
Учені з Університету Північної Аризони представили OpenExo - відкриту платформу для розроблення роботизованих екзоскелетів21:11 28.06.2025Група дослідників під керівництвом доцента Зака Лернера з біомехатронної лабораторії Університету Північної Аризони опублікувала в журналі Science Robotics опис OpenExo - першої всеосяжної відкритої платформи для створення екзоскелетів.


